My research is situated in the areas of human robot interaction and assistive technology. I focus on the design of new technologies that can support disabled people and their families in community settings, and clinicians and patients in acute care.
Our research informs work across multiple disciplines, including: robotics, health informatics, design, and public health. You can read more of our recent papers here, and learn more about working in the lab and the kinds of research we do here.
We engage in participatory, community-based research to center the voices of individuals historically excluded from technology design and development, and are committed to exploring the ethical, legal, and social implications (ELSI) of our research.
Here are a few project highlights:
Cognitively assistive robots
We have been collaboratively designing and developing new technologies to support people with mild cognitive impairment (MCI) to those with late stage dementia. This includes social robots that can extend access to cognitive neurorehabilitation at home (Bouzida et al., HRI 2024, Kubota et al. HRI 2023, HRI 2022, HRI 2020), and robots to support interactions with care partners (Guan et al., CHI 2021, Moharana et al., HRI 2019).
We also have developed new ways for people with MCI to program robots (Cruz Sandoval, HRI 2025), and have explored how systems can support long term learning and adaptation (Woodworth et al., MLHC 2018; Wang et al. AISTATS 2021, Bestmann et al., HRI 2024).
Clinically assistive robots (acute and critical care)
We have several projects centered on supporting clinicians and patients in acute care environments, including the emergency department (ED), as well as critical care (e.g., the ICU). Here, we have been designing low-cost, open source telemedical robots that can keep healthcare workers safe, and extend access to patients, particularly those from low-resource settings. (Matsumoto et al., HRI 2023, Pervasive Health 2021).
We are also designing new methods for understanding clinical team behavior in real time, and use that to inform how robots should act, such as when supporting teams in high-acute situations ( Taylor et al., HRI 2022, ICRA 2021, CSCW 2019, Haripriyan et al., RO-MAN 2024), and exploring the design of resilient hospitals of the future (Taylor et al., CSCW 2022). Recently, we have explored care work, and exploring what it means to embed technology within complex acute care settings (Jayaraman et al., HRI 2026).
Coordination methods to improve autonomy for physically assistive robots
We also conduct basic research which informs these domains. Some of our recent work focuses on facilitating autonomy - it is important that robots are able to do the right thing, at the right time, and in the right way, especially in safety critical settings. For example, we created a series of methods to model human-human and human robot synchrony that can inform coordinated robot behavior, validated in experimental settings (Iqbal et al., T-AC 2015, T-RO 2016, RA-L 2017, ICRA 2021).
Critical health technology design & ethics
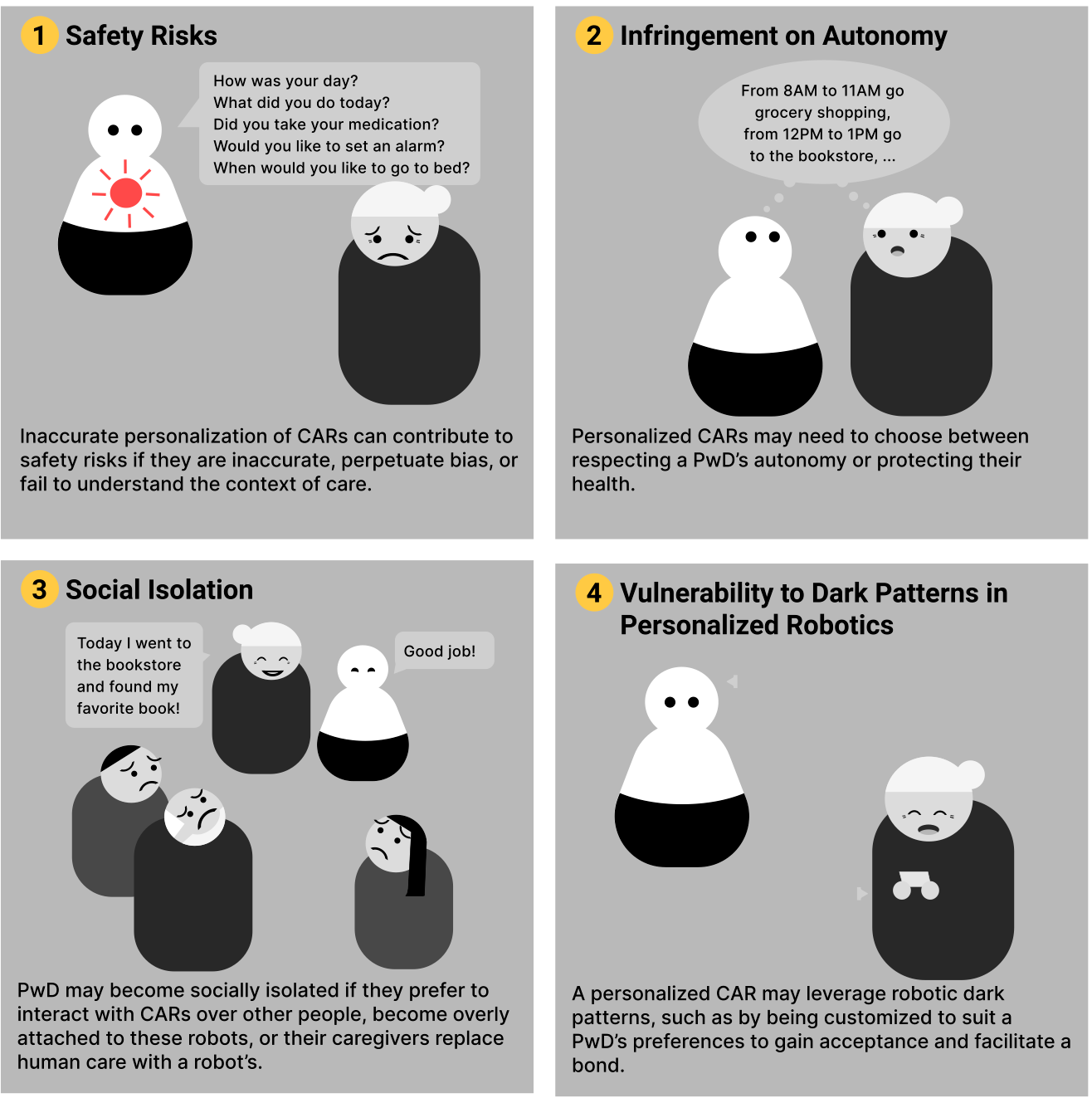
We are also work on critical health technology design, and ELSI topics. For example, we've explored how to engage in value-centric design processes when creating assistive and personalized robots for people with dementia that support their autonomy (Kubota et al., We Robot 2021, Guan et al., CHI 2021), ways to reflect social models of disability to reframe assistive robotics (Lee and Riek, THRI 2022, THRI 2018), ways to design for exit (Bjorling and Riek, We Robot 2022), and supporting disability justice (Ghosh et al, HRI 2026). We also have explored how these technologies impact the clinical workforce (Riek and Irani, CHI 2025)

Healthcare Robotics Lab, Jun 2021